
高达,男,1996-,黑龙江省佳木斯市同江市乐业镇人,北华大学机械工程学院,大学本科生,主要从事机械装备自动控制方面的研究。
摘要:基于STM32的双臂能够将任意打乱的三阶魔方快速还原。在研究各种机构的基础上,设计了一种体积小、速度快、性能稳定的机械结构,能使魔方机器人适应不同环境。
魔方不仅是益智玩具,又是运动用品和教学用具。魔方竞技逐步向复合型手、眼、脑协调运用等多样化脑力运动方向发展。2010年10月,机器人Cubinator在18.2秒内还原魔方,成为当时世界上还原魔方速度最快的机器人。2011年6月由澳大利亚墨尔本斯威本科技大学研制的机器人Ruby还原解魔方仅用了10.18秒,并打破上述记录。随着计算机技术和人工智能等技术的发展,将魔方与智能机器人的结合,在科普领域取得了突破性的进展。还原魔方机器人是智能化机器人的一个全方面体现,对其算法和机构的研究也成为机器人技术的十分重要的研究内容,解魔方机器人整体的架构和多种变型模式也是近几年来的热点。
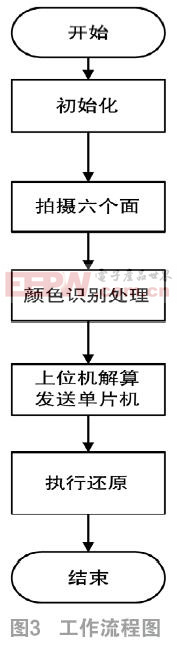
基于STM32双臂魔方机器人是一个能够将任意打乱的三阶魔方快速还原的机器人。它涉及魔方色块数据采集、魔方还原步骤解算、机械手控制系统以及手臂旋转系统。本文介绍的魔方机器人主要由两组机械手臂组成,通过电机支座将两个手臂固定在底座上,在电机和舵机的分别驱动下,模拟实现人手部和腕部的动作。舵机带动联杆转动,进而驱动两根机械手指在导轨上滑动,实现机械手指的夹紧和松开动作;伺服电机带动支撑板转动,实现机械手腕部转动。摄像头把魔方照片发送给主控处理、识别颜色,之后主控将魔方状态序列发送给上位机解算。主控板通过伺服驱动器控制直流伺服电机转动。魔方机器人根据上位机传回的指令还原魔方。该机器人的最大特点是:完全由STM32控制、体积小、结构简单、成本很低,能够大量的普及。
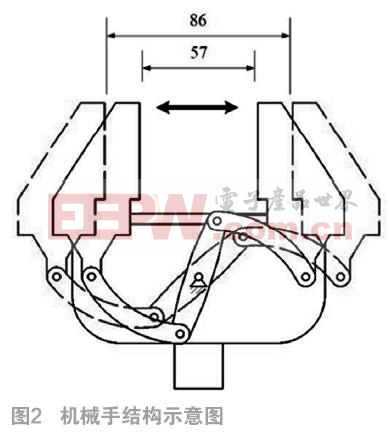
该机器人还原魔方的过程是通过两只机械手臂配合完成的,机械手臂通过电机支座对向安装在固定底座上,模拟人手腕和手指动作。舵机驱动机械手指直线运动,实现对魔方的夹紧与松开;伺服电机做回转运动,实现魔方的回转。

机械臂主要由伺服电机、电机支座、编码器等部件组成。电机支座采用聚乳酸(PLA)材料3D打印完成,为保证其强度,两侧分别设计有10 mm厚加强筋,电机支座与固定底座之间为螺栓联接,保证机械手臂在运行过程中的稳定性。编码器把角位移或直线位移转换成电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
机械手主要由机械手指、导轨、联杆、舵机、舵机固定座等部件组成。通过曲柄连杆机构使机械手指在导轨上做直线运动,动力由舵机供给。为保证机械手的刚度和强度,导轨和舵机固定座均采用Q235钢制作而成。通过优化计算得出,两手指间最小距离57 mm,最大距离为86 mm,单个手指的直线 电气系统设计
3.1 控制中心本作品中的主控芯片选用的是意法半导体公司的STM32F407ZET6,融高性能、实时性、数字信号处理、低功耗、低电压于一身,同时保持高集成度和开发简易的特点。具有多路PWM、ADC、UART等,最高72 MHz工作频率。魔方机器人需要两路PWM控制舵机,通过UART将上位机与主控芯片通信,故满足魔方机器人的运动控制的需要。
为了满足魔方手指张合快速,选择JX-6221舵机在6 V电压下力矩25.2 Kg•cm ,大于所要求的转矩,完全满足稳定夹持魔方的需求。
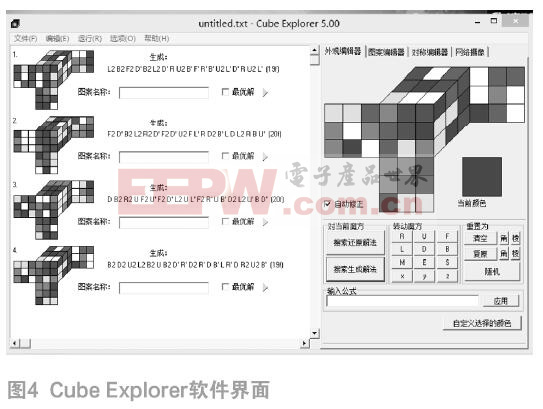
通过颜色识别模块对魔方六个面进行拍照,提取出54个颜色信息,采用Kociemba 算法,优化传统的通过设定阈值的颜色识别策略,通过上位机解算,完成解算后通过串口发送给STM32控制中心,将步骤优化,获得还原魔方的最优解。
根据魔方机器人的机械结构与夹持魔方的方式,对魔方的还原步骤一一对应在舵机与电机的动作上。有两个基础面,通过两个手的动作分解,将魔方的其他面转换到基础面进行还原。在完成动作分解后,魔方初始位置发生转变。因此在魔方每一次为坐标发生转换时,就将魔方此时的坐标与初始位置比较,如果确实发生坐标转变,则通过赋值的方式把初始坐标和现在的坐标转换。为了解决魔方因“手指”夹不紧造成掉落的问题,在“手指”上放置橡胶垫,增大摩擦力。由于电机有引线,不可避免电机在旋转过程中产生缠线的问题,因此在一个动作完成后,就使电机旋转至原始位置。

在STM32处理器的技术上设计并完成了整个魔方机器人,研究其机械结构、机械手颜色识别等。最后通过算法设计得到魔方还原平均步数为20步,机器人能够在平均一分钟自动解算并还原魔方。该机器人成本低,体积小、性能稳定、普及性强,能够对环境有很强的适应性。
[2]郑雨辰,王婷.基于二阶段双向搜索的解魔方机器人研究[J].科技风,2017(05):2.

江锐集团:深耕货架行业十八载助力智能仓储新发展——访江锐集团业务总经理王慧 江锐集团深耕仓储货架制造行业18年,以国际化品质标准,成功走向海外市场,积极开拓国内市场,并围绕 ......More>>
不断突破传统构型国产商用客机正谋划未来之路 此前系列文章中我们提到,我国商用客机产业链已经初步成型,并正对标世界先进的商用飞机研发水平不断追 ......More>>
